Home
MEC524 — Chapter Overviews
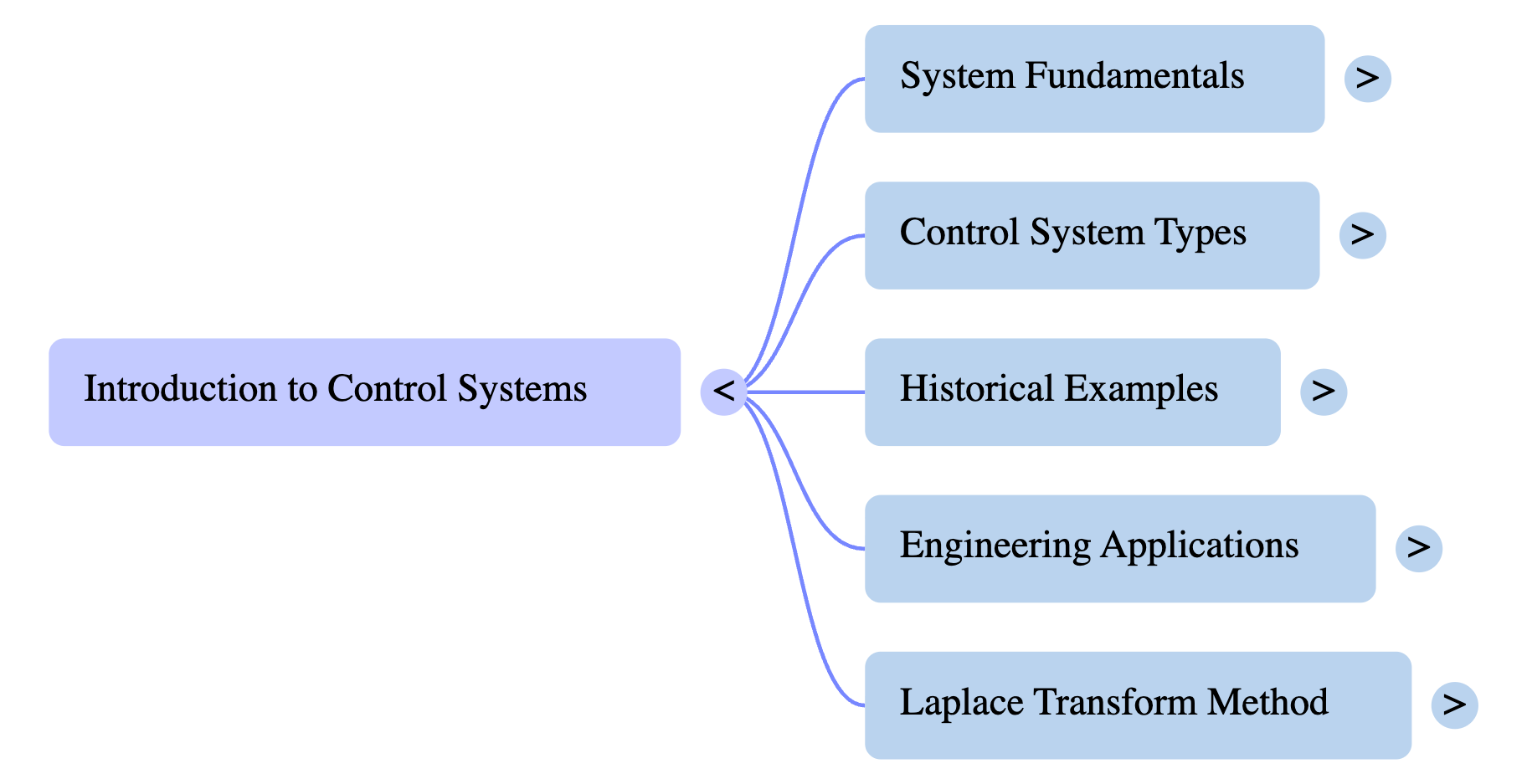
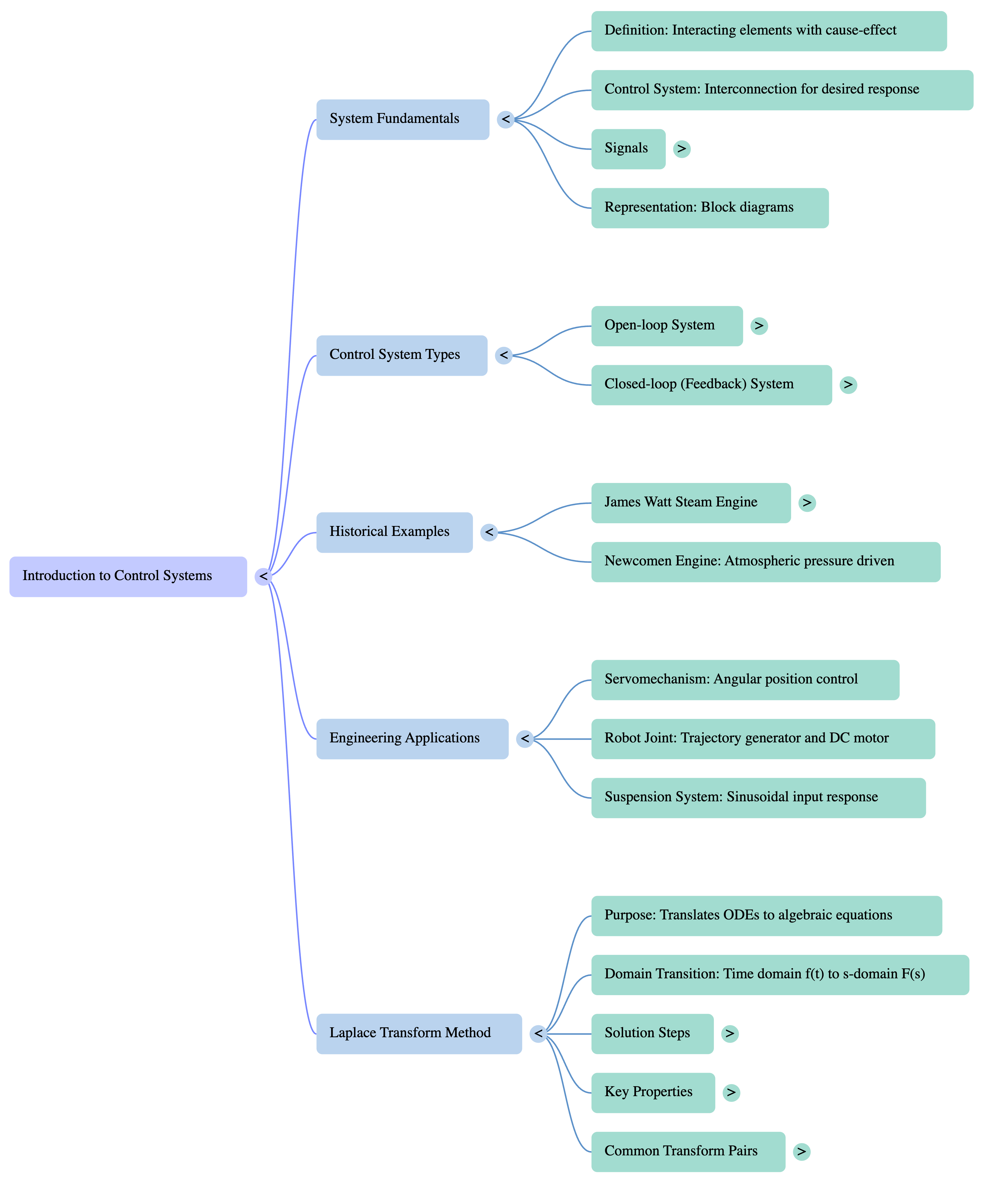
Introduction to Control Systems
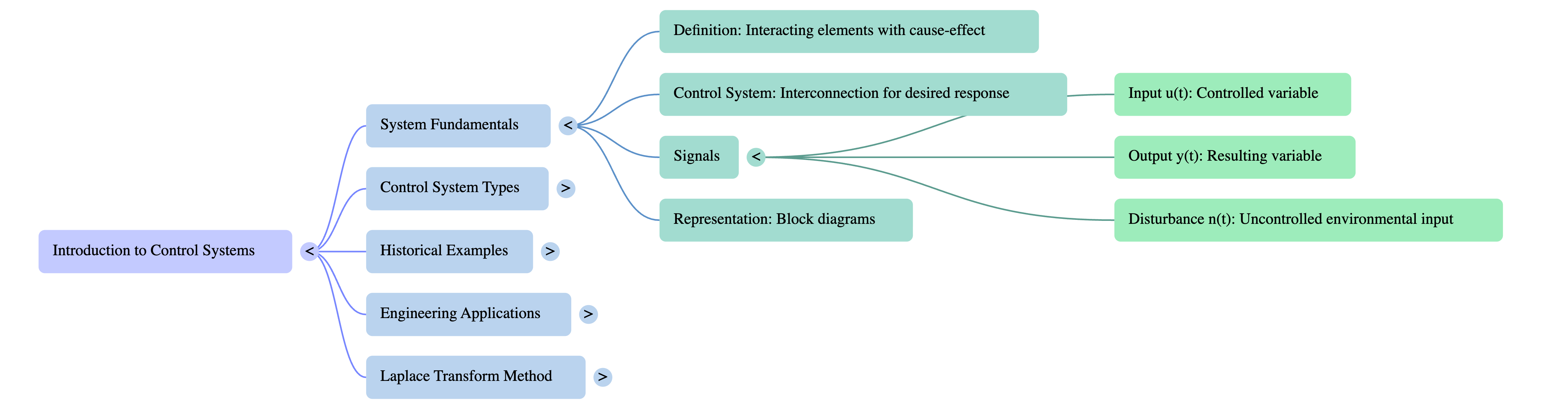
System Fundamentals
Every control system has four core elements:
- Controller — computes corrective action from error
- Actuator — converts signals into physical forces
- Plant — the physical process being controlled
- Sensor — measures output for feedback
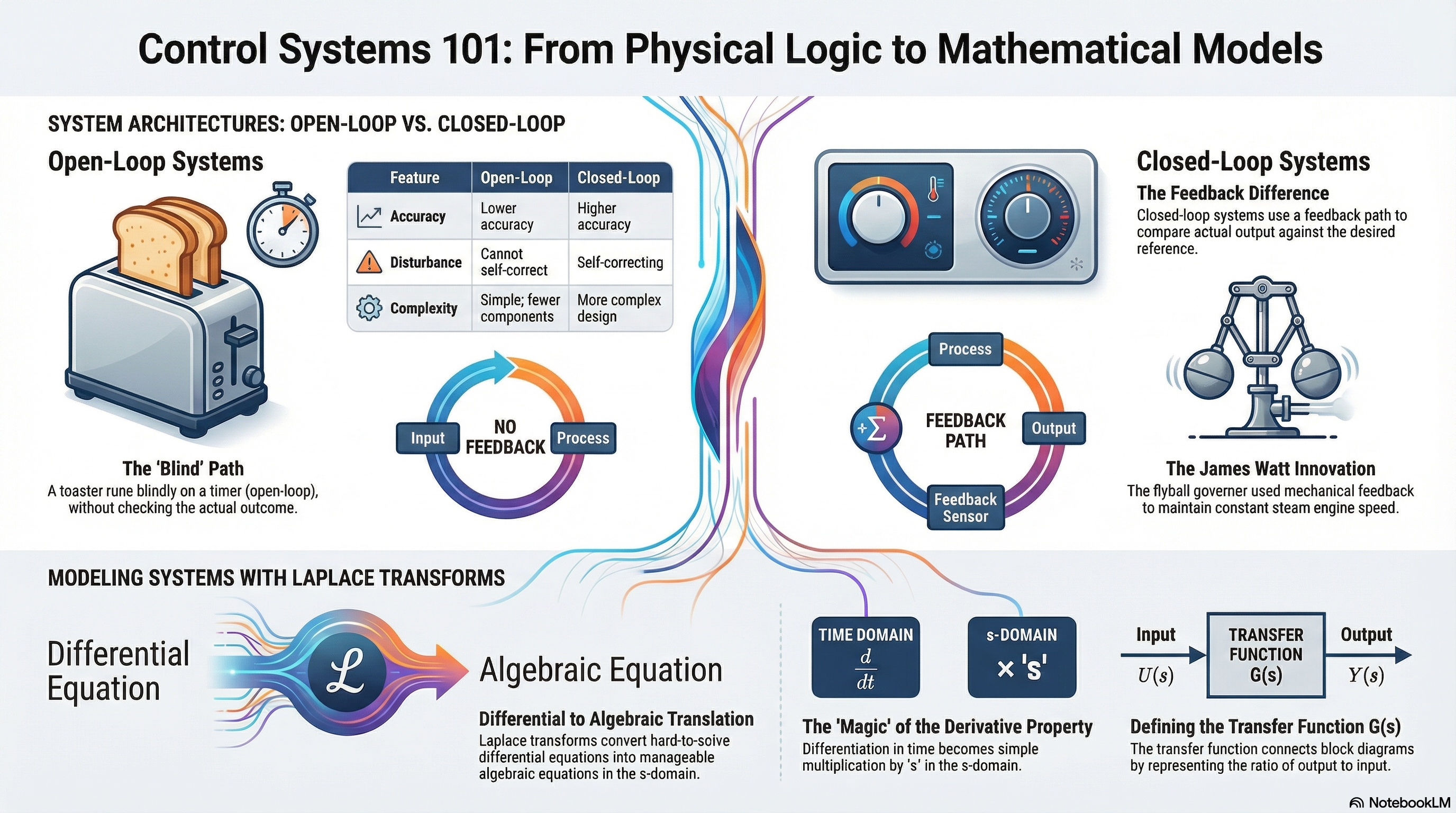
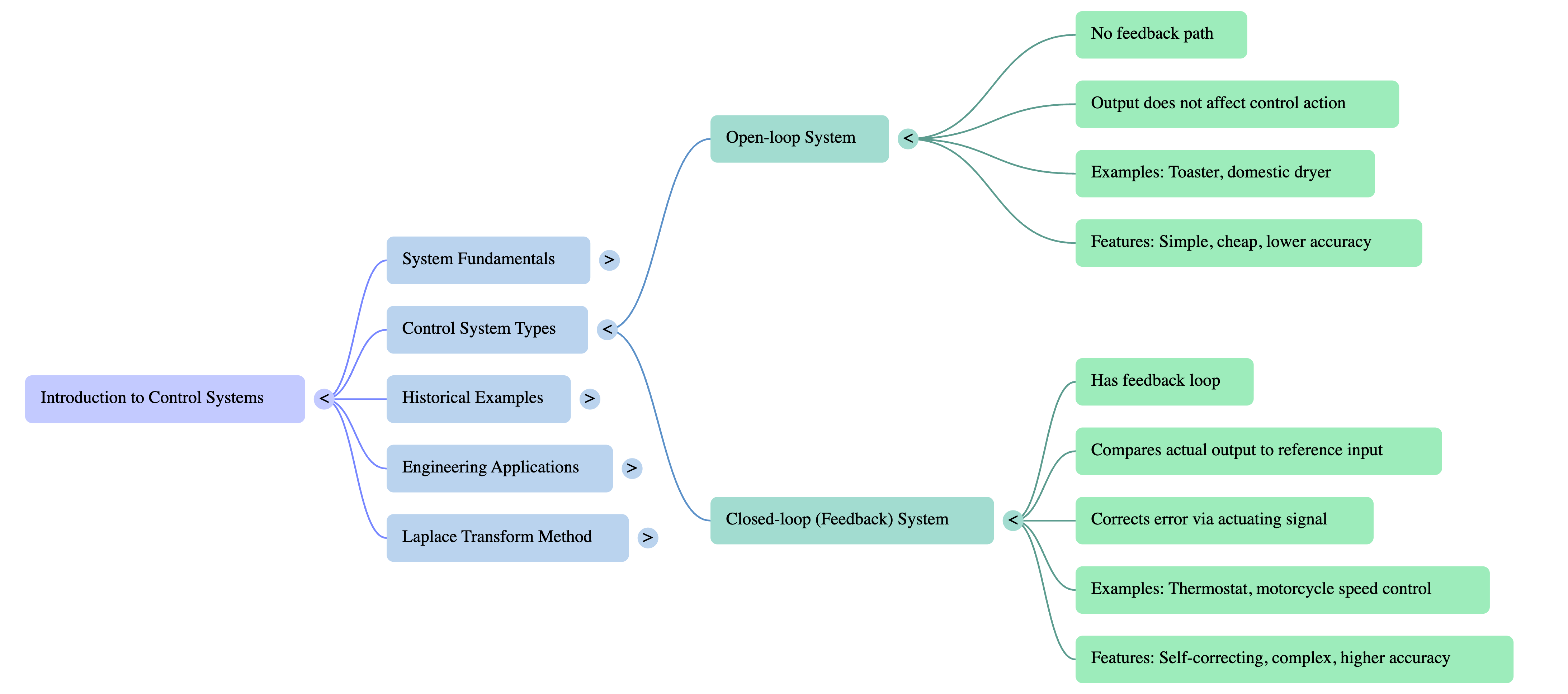
Open vs Closed Loop
| Feature | Open | Closed |
|---|---|---|
| Accuracy | Lower | Higher |
| Disturbance | Can't correct | Self-correcting |
| Complexity | Simple | More complex |
Analogy: The Toaster
A toaster runs blindly on a timer (open-loop) without checking toast darkness — it can't self-correct.
The Feedback Difference
Closed-loop systems use a feedback path to compare actual output against the desired reference.
Error Signal
e(t) = r(t) − y(t)
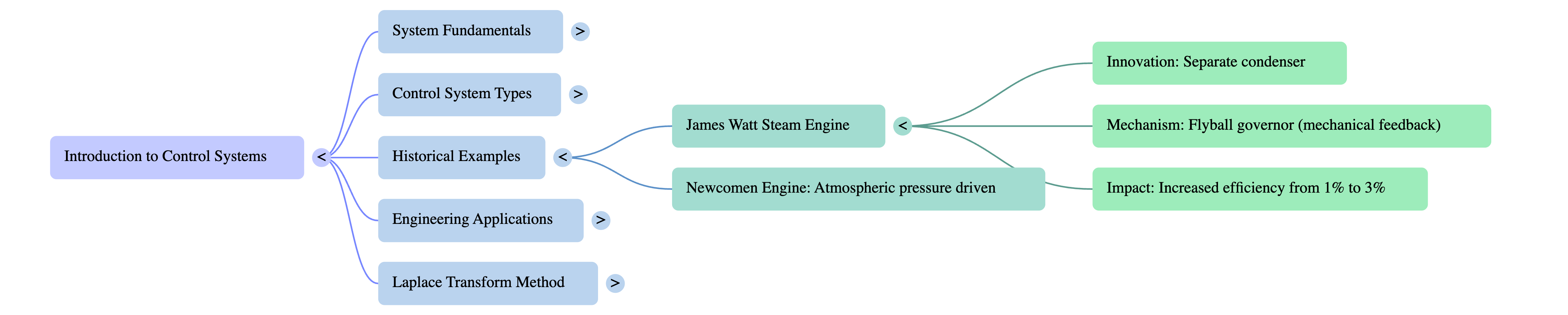
James Watt Innovation
The flyball governor used mechanical feedback to maintain constant steam engine speed.
PID Controller
PID Equation
u(t) = Kp·e(t) + Ki·∫e(t)dt + Kd·de/dt
- P — proportional to current error
- I — accumulated past error (eliminates offset)
- D — rate of change (reduces overshoot)
Laplace Transform
Differential → Algebraic translation.
Converts differential equations into algebraic equations in the s-domain.
The Derivative Property
d/dt → × s
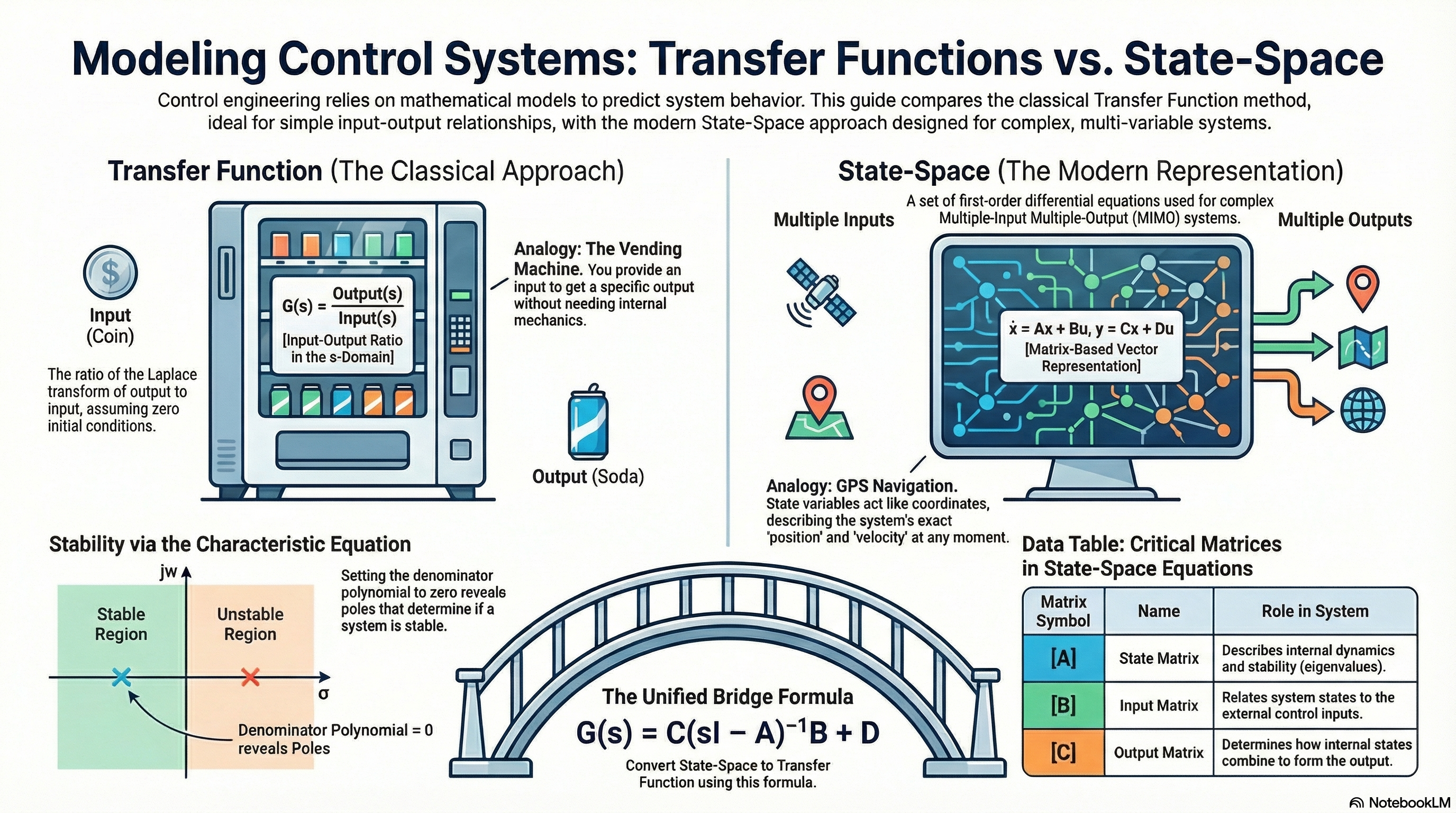
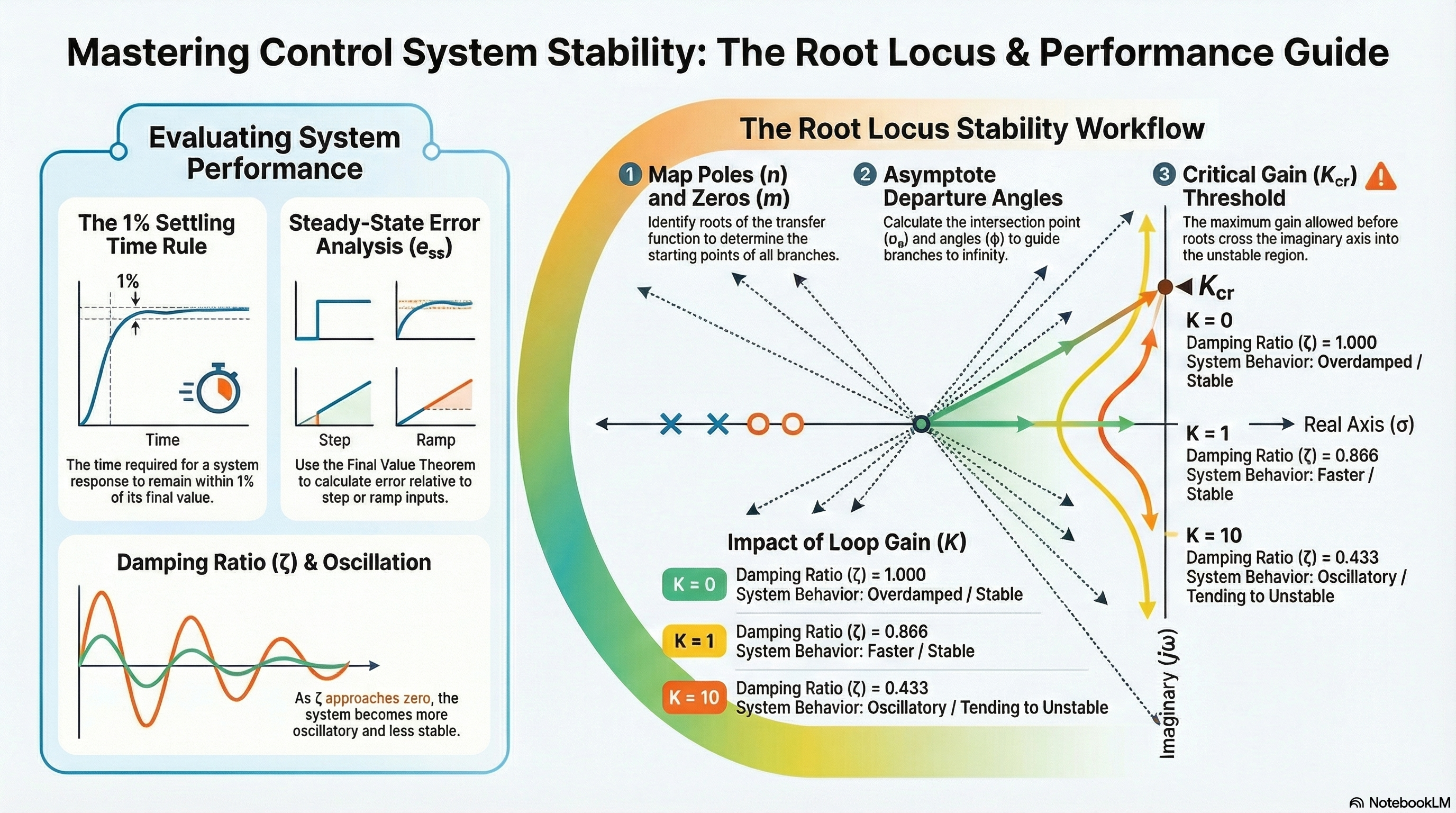
Transfer Function G(s)
Represents the ratio of output to input.
Definition
G(s) = Y(s) / U(s)
Series: G₁·G₂ | Parallel: G₁+G₂ | Feedback: G/(1+GH)
Mind Maps
MEC524 Control Engineering · Fakulti Kejuruteraan Mekanikal, UiTM Shah Alam · Abu Haqeem